Melhores Configurações para Performance Máxima e Diversão Sem Limites com seu Tinywhoop!

Os Tiny Whoops são altamente populares entre pilotos de FPV devido ao seu tamanho compacto e agilidade, perfeitos para voos internos e espaços apertados. No entanto, para obter o melhor desempenho, é necessário ajustar diversas configurações no Betaflight, Bluejay, FPV e no seu rádio. Vamos mergulhar nas configurações ideais para que você possa extrair o máximo do seu Tiny Whoop.
Conectores BT2.0 ou A30
Se você ainda está usando PH2.0, é hora de mudar! Conectores BT2.0 e A30 têm desempenho significativamente melhor, com menos queda de voltagem e mais tempo de voo. Ambos são semicompatíveis, portanto, qualquer um deles trará benefícios.
Configuração do Sistema FPV
Ao voar em ambientes internos, geralmente não há necessidade de usar potência maior que 25mW no seu VTX. Isso maximiza o tempo de voo e reduz o superaquecimento.
DICA: Escolha um canal VTX longe da banda de frequência do WiFi (por exemplo, canal 8 da Raceband) para melhorar a qualidade do vídeo.
Para maior conveniência, use duas antenas stubby nos seus goggles de FPV, posicionadas a 90 graus uma da outra. Elas são leves e compactas. Se você não souber escolher a polarização (RHCP ou LHCP), vá de RHCP, que é mais popular para FPV analógico.
Configuração do Link de Rádio
Usando um link de rádio ExpressLRS em ambientes internos? Considere escolher o nível de potência mais baixo, como 25mW ou 10mW, para aumentar a vida útil da bateria do rádio. Para taxas de pacote, use 500Hz ou até 1000Hz para minimizar a latência. No entanto, para a maioria das pessoas, 250Hz já é suficiente.
Essa é a dica mais valiosa sobre pilotagem de drones FPV que você vai ver hoje! Saiba Mais
Aplique o preset no Betaflight do ExpressLRS de acordo com a taxa de pacote específica para evitar vibrações indesejadas.
Atualizando o Firmware para o Bluejay
Flashar o Bluejay no seu ESC é altamente recomendado por duas razões:
- Permite uma frequência de PWM mais alta.
- Ativa o DShot bidirecional, possibilitando filtros de RPM no Betaflight.
Escolha uma frequência de PWM que atenda suas necessidades:
- 24KHz: Melhor desempenho do motor.
- 96KHz: Maximiza o tempo de voo.
- 48KHz: Equilíbrio entre resposta e eficiência.
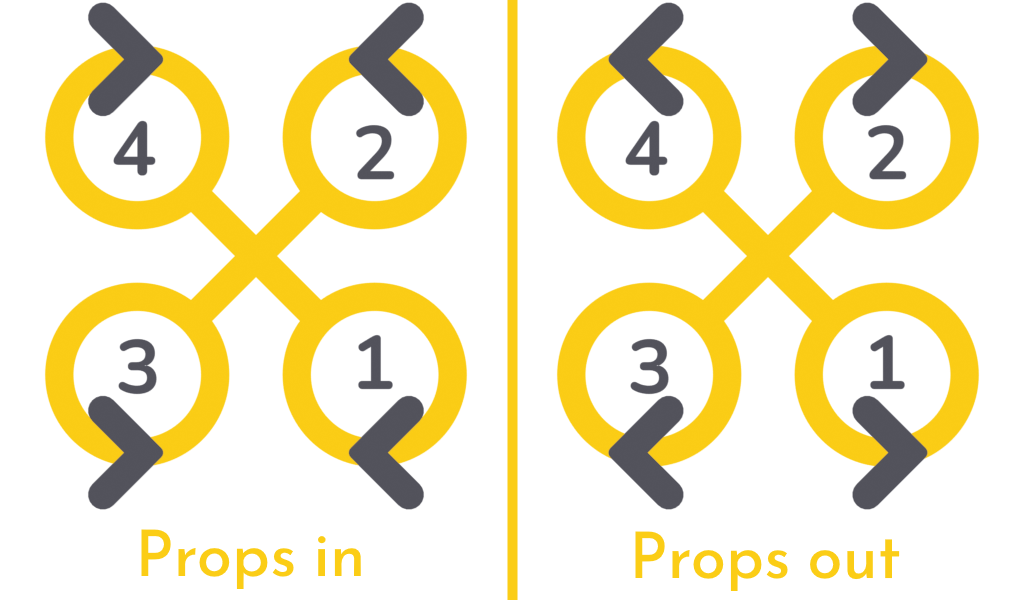
Hélices Props In ou Props Out?
Props in e props out referem-se à direção de rotação dos motores e montagem das hélices. Para Tiny Whoops, props out é a configuração mais popular, oferecendo melhor desempenho. No entanto, se você experimentar problemas durante curvas e descidas, tente props in.
Configuração do Betaflight
Por que Pilotos de Tiny Whoop Voam em Modo Ângulo
O modo ângulo é preferido por ser mais fácil de controlar em espaços internos apertados, corrigir automaticamente após encontrar um obstáculo e oferecer controle preciso, essencial em corridas.
Configurações do Modo Ângulo
- Força do Ângulo: 90 (Reduza se achar apertado demais).
- Limite do Ângulo: 60 (Controle o quanto o quad pode inclinar antes de limitar).
Desative o Airmode quando voar em modo ângulo para facilitar a recuperação após colisões.
Escalonamento do Acelerador
No tab de Rates, configure o limite do acelerador para “Scale” e 90%. Isso aumenta a resolução do acelerador, útil para voos mais relaxados em ambientes internos.
Outras Configurações
- Resposta do Acelerador: 6-10 (Melhora a resposta do acelerador).
- Compensação de Queda de VBAT: 100% (Mantém o desempenho consistente durante todo o voo).
- Idle do Motor: 8% a 10%.
- Configurações da Voltagem da Bateria: Mínima 3.2V e aviso a 3.4V por célula.
- Configuração do OSD: Mantenha elementos mínimos, como voltagem da bateria e tempo de voo.
Perfis de Taxas (Sugestões)
Para voos mais agressivos:
- Tipo: Actual
- Sensibilidade no Centro: 150
- Rate Pitch/Roll: 1200
- Rate Yaw: 1500
Para voos mais suaves:
- Tipo: Actual
- Sensibilidade no Centro: 70
- Rate Pitch/Roll: 800
- Rate Yaw: 1000
Habilitando a Recuperação de Queda no Betaflight
A Recuperação de Queda estabiliza seu quad após colidir com um obstáculo, facilitando a retomada do controle e melhorando a performance em ambientes internos.
Para habilitar:
- No tab CLI do Betaflight, digite
set crash_recovery = ONseguido desave.
Ajuste parâmetros como sensibilidade e taxa de recuperação conforme necessário para otimizar o desempenho.
Conclusão
Configurar seu Tiny Whoop com essas dicas e ajustes pode melhorar significativamente sua experiência de voo. Lembre-se, essas são apenas configurações iniciais. Adapte-as conforme seu hardware específico e estilo de voo.
Porque tentamos aprender sozinhos quando podemos ter a orientação de especialistas e acelerar nosso progresso? Saiba Mais
Não se esqueça de se inscrever no nosso canal do Youtube para mais conteúdos e dicas sobre drones de FPV.
Conheça nossos Cursos e Formações em Drones de FPV.
#fpv #dronefpv #drone #academiadofpv #dronedefpv #cursodedrone #droneracer #filmagemcomfpv #montardronefpv #cursodrone #cursodronefpv #tinywhoop #flighttime #vtxsettings #expresslrs #betaflight #motorconfig #escsettings #pwmfrequency #firmwareupdate #propellers