As Melhores Configurações de ESC com o BLHeli_32 para Desempenho Ótimo em Drones FPV
Desbloquear o verdadeiro potencial do seu drone FPV é mais simples do que parece. Com as configurações certas do BLHeli_32, você vai elevar o nível de suas sessões de voo. Aqui está um guia completo com as melhores configurações BLHeli_32 para otimizar o desempenho do seu drone.
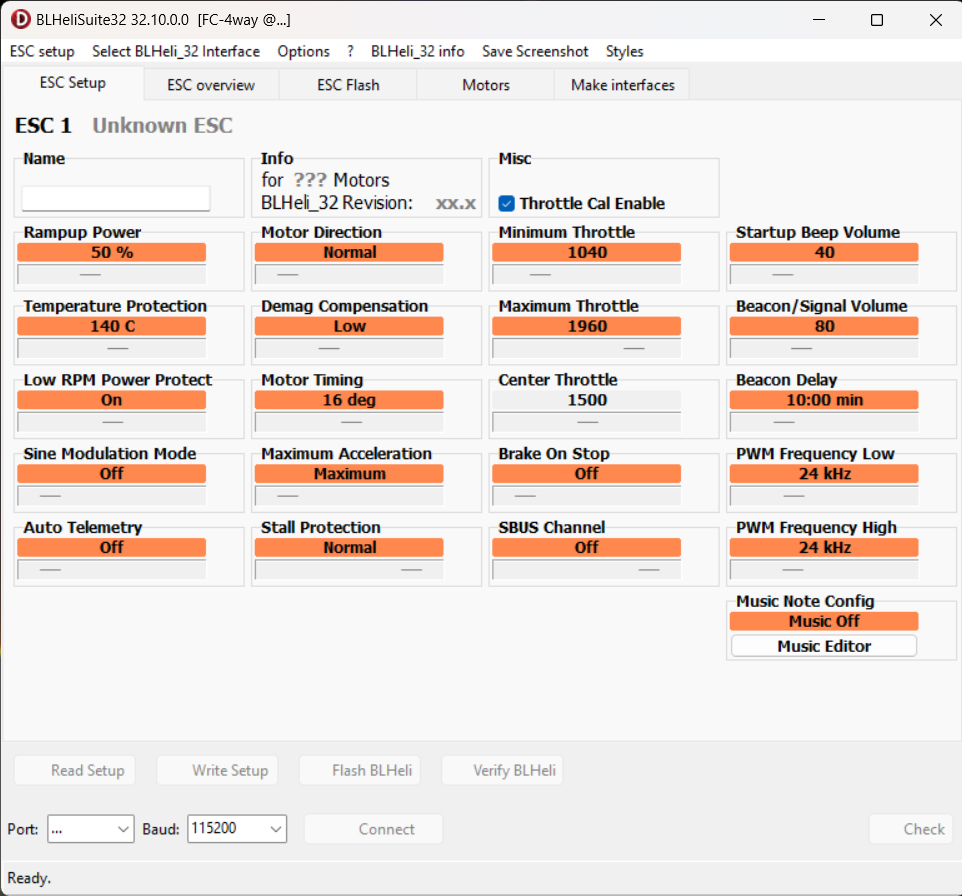
Configurações BLHeli_32
Recomendo as seguintes configurações para um desempenho de primeira linha:
Frequência PWM
- 48KHz: Ideal para a maioria dos builds, especialmente freestyle e cinematográficos. Reduz o ruído no giroscópio.
- 24KHz: Para máximo desempenho do motor em corridas e para builds que precisam de mais torque, mas pode ocasionar vibrações e distorções no vídeo.
- Por RPM: Para long range, ajusta dinamicamente a frequência durante o voo.
- Drones menores (2” ou menos): 48KHz oferece o melhor equilíbrio entre torque, ruído e eficiência.
Outras Configurações
- Timing do Motor: 24 graus ou Auto.
- Ramp-up Power: 30%
- Protocolo do ESC: DShot600 para frequência de loop de PID de 8KHz, DShot300 para 4K, e DShot125 para 2K
- Compensação de Desmagnetização: Deixe em Low ou ajuste para Alto em caso de desincronização do ESC (desync).
Essa é a dica mais valiosa sobre pilotagem de drones FPV que você vai ver hoje! Para mais detalhes, confira nossa formação completa: Saiba Mais.
Ajustes Profundos: Frequência PWM
A frequência PWM (Pulse Width Modulation) impacta diretamente na resposta e eficiência do motor. Frequências mais altas melhoram a eficiência, mas podem reduzir o torque de frenagem. Aumentar a frequência para 48KHz pode melhorar a suavidade do voo, reduzir oscilações e até mesmo prolongar o tempo de voo.
Como Frequências PWM Mais Altas Reduzem Vibrações
Frequências PWM mais baixas podem causar conflitos entre a taxa de comutação e a taxa de atualização PWM, resultando em vibrações incomuns. Frequências mais altas movem esses conflitos para fora da faixa de comutação, reduzindo as vibrações e resultando em um voo mais suave.
Desvantagens das Frequências PWM Altas
Apesar dos benefícios, frequências mais altas sacrificam potência de frenagem e responsividade. Para corridas, frequências mais baixas como 24KHz podem ser preferidas, mas 48KHz oferece um bom equilíbrio para a maioria.
Frequência PWM Variável por Posição do Acelerador
A configuração de frequência PWM variável (By RPM) ajusta a frequência com base na posição do acelerador, oferecendo torque alto em baixas acelerações e suavidade em altas.
Frequência PWM Variável por RPM
Essa configuração rastreia o RPM do motor, evitando harmônicos problemáticos e utilizando a frequência PWM mais baixa possível em acelerações altas para manter a responsividade.
Tudo que você sempre quis saber sobre drones FPV em uma formação completa de 30 dias. Aproveite nossa formação especializada: Saiba Mais.
Configurações de Tempo Motor
Ajusta quando o ESC envia o pulso elétrico para ativar as bobinas do motor. Configurações mais altas aumentam o torque e o calor do motor, enquanto configurações mais baixas limitam o torque.
- 16°: Ideal para long range e eficiência.
- 24°: Focado em potência para freestyle e corridas.
Protocolo do ESC
O DShot é o protocolo mais avançado e recomendado. Ele elimina a necessidade de calibração, suporta beacon ESC (motores como beepers) e é necessário para telemetria ESC.
Compensação de Desmagnetização
Ajuda a reduzir problemas de desincronização do ESC. Deixe essa configuração em padrão, a menos que ocorram problemas de desincronização. Em builds de alta potência, ajuste para Alto.
Ramp-up Power
Controla a rapidez com que o ESC aumenta a potência. Limitar a mudança de potência ajuda a resolver problemas de desincronização e ruído elétrico. Para garantir confiabilidade, use entre 20% e 30%.
Proteção de Corrente
Limita a amperagem através do ESC, protegendo-o de picos de corrente e desincronizações. A menos que você saiba o que está fazendo, mantenha essa proteção desligada.
Dead Time
Refere-se ao intervalo entre cada pulso PWM em que o ESC desliga a energia da bobina do motor. Um dead time mais curto é desejável para melhor desempenho, mas um dead time muito curto pode causar superaquecimento.
Para drones FPV, mantenha as configurações restantes em seus valores padrão, pois são voltadas para aeronaves fixas e não impactam significativamente o desempenho de drones FPV.
Não se esqueça de se inscrever no nosso canal do Youtube para mais conteúdos e dicas sobre drones de FPV.
Conheça nossos Cursos e Formações em Drones de FPV.
#fpv #dronefpv #drone #academiadofpv #dronedefpv #cursodedrone #droneracer #filmagemcomfpv #montardronefpv #cursodrone #cursodronefpv #blheli32 #escracing #timingmotor #frequenciapwm #desmagnetizacao #protocoloesc #rampuppower #torquemotor #protecaocorrente #suavidadevoo