
Seu drone de FPV não quer armar? Veja como resolver!

Imagine estar pronto para voar e… seu FPV drone simplesmente não arma. A frustração é real, mas calma lá! Vamos resolver isso, principalmente se você estiver usando o firmware Betaflight. Vamos diagnosticar e corrigir esses problemas para que você possa voltar a voar em pouco tempo!
Primeiras Coisas a Verificar
Vamos direto ao ponto e analisar algumas das primeiras verificações para diagnosticar por que seu drone não está armando.
Desconectar o Cabo USB
O Betaflight possui uma função de segurança onde os motores não giram se o controlador de voo estiver conectado ao configurador (você verá um aviso MSP no OSD e CLI ao tentar armar). Desconecte o USB e tente novamente.
Mover o Stick de Aceleração para Baixo
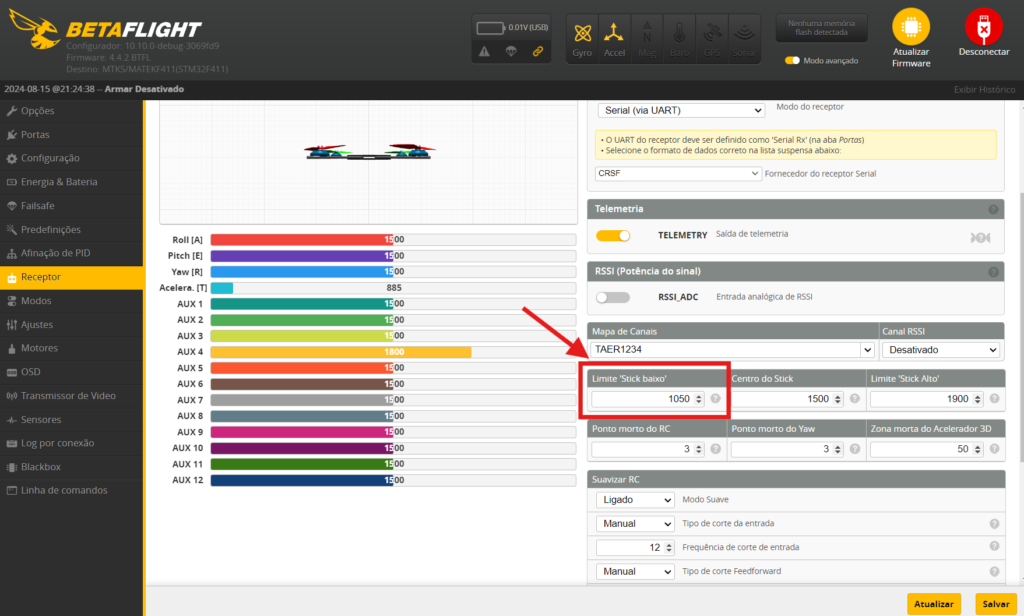
O stick de aceleração precisa estar na posição mais baixa para armar. Betaflight não arma se a aceleração mínima for muito alta (acima da configuração “Mínimo do Acelerador”, aba Receiver). Verifique se a aceleração está abaixo do valor Mínimo do Acelerador quando o stick está na posição mais baixa na aba Receiver. O padrão do Mínimo do Acelerador é 1050.
Verificação do Receptor de Rádio
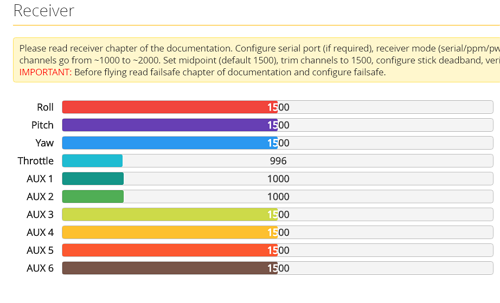
Certifique-se de que seu receptor de rádio está vinculado e funcionando corretamente no Betaflight. Vá até a aba do receptor para ver se as respostas dos canais correspondem aos movimentos dos sticks corretamente. E não se esqueça de baixar o configurador Betaflight mais recente.
Configurar o Modo de Armar
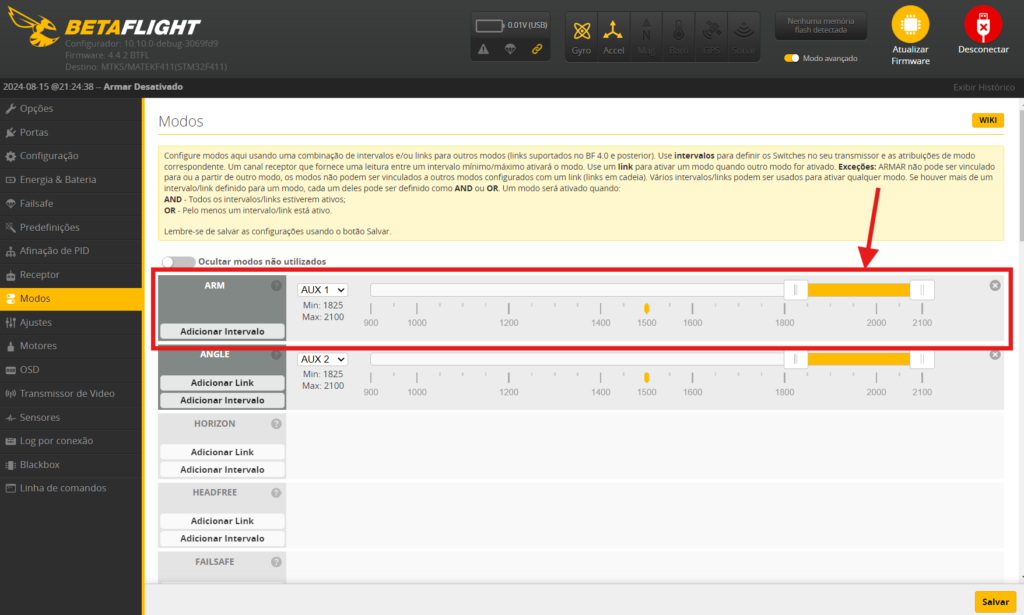
Você atribuiu um interruptor no seu rádio para o modo ARM? Ele deve acender em amarelo quando ativado, sinalizando que está tudo certo. Se você estiver usando um receptor ExpressLRS, o interruptor ARM deve estar atribuído ao AUX 1 (canal 5)!
Essa é a dica mais valiosa sobre pilotagem de drones FPV que você vai ver hoje! Saiba Mais
Como Verificar Problemas de Armar no Betaflight
OSD
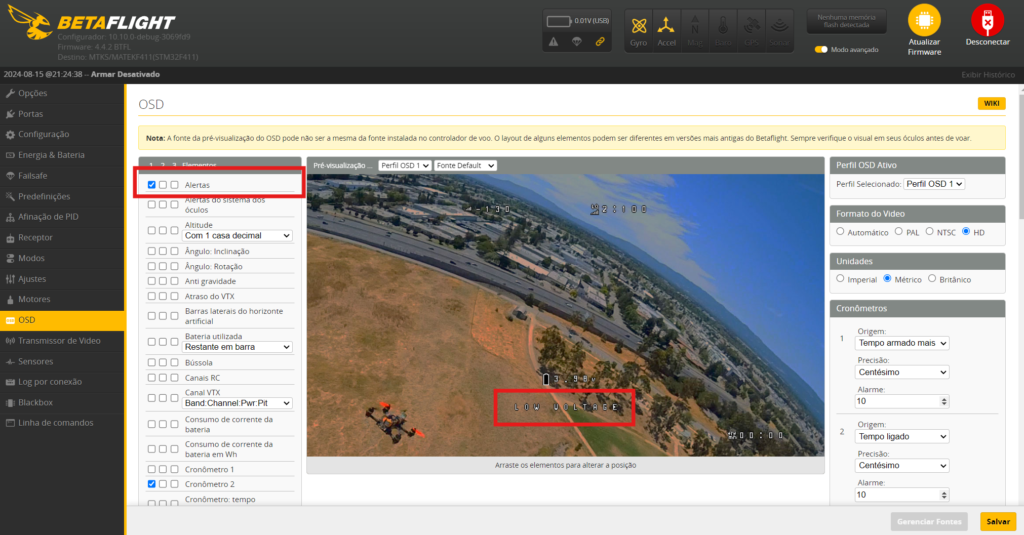
Se você tem OSD no Betaflight, ative o elemento “Warnings” na tela com “Arming Disabled” selecionado. Isso dará uma pista na tela do seu óculos do que está impedindo o drone de armar.
Configurador Betaflight
Com acesso a um computador, você pode verificar as bandeiras de desarmamento na aba Setup no configurador Betaflight.
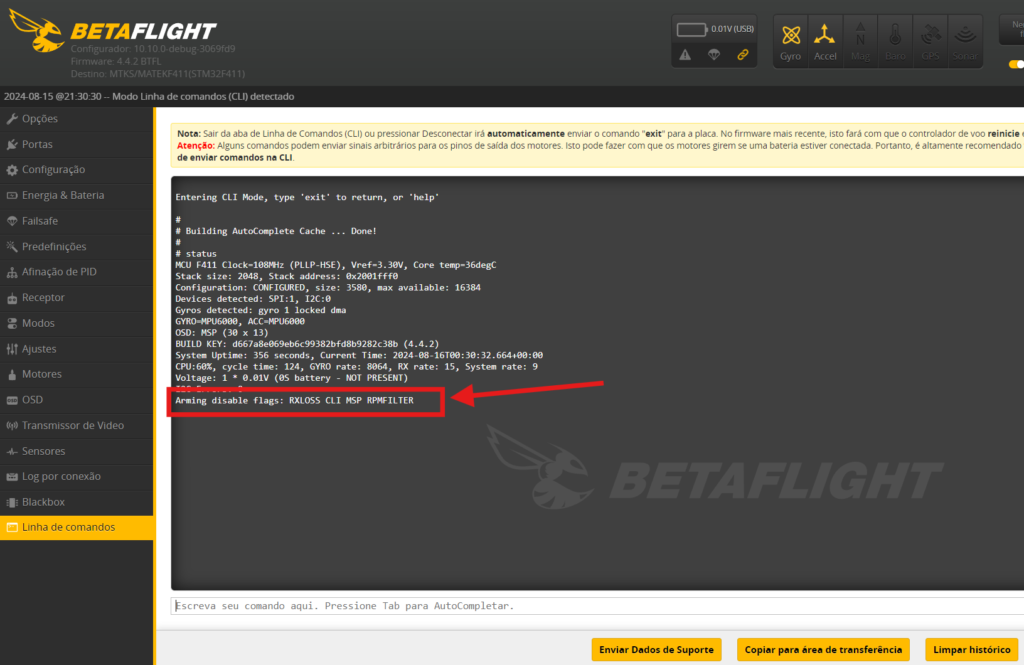
CLI
Alternativamente, você pode verificar no CLI digitando o comando “status”, a última linha é a lista de bandeiras de prevenção de armar.
Beep do Buzzer
Se você não tem um computador, mas seu drone possui um buzzer, os beeps devem indicar as flags de desarmamento. Aqui está como decifrar o padrão de beeps:
- Cinco beeps curtos iniciais, que podem ser ignorados.
- Alguns beeps longos.
- Alguns beeps curtos com intervalos longos.
Cada beep longo representa 5, enquanto cada beep curto representa 1. O número final da flag pode ser calculado como 5 x <número de beeps longos> + <número de beeps curtos>.
Tabela de Códigos de Prevenção de Armar
| Nome | Descrição | Código de Beep | Ações Requeridas |
|---|---|---|---|
| NOGYRO | Um giroscópio não foi detectado | 1 | Pode ser uma falha de hardware ou o firmware errado. |
| FAILSAFE | Failsafe está ativo | 2 | Corrija a condição de falha e tente novamente. |
| RXLOSS | Não foi detectado sinal de receptor válido | 3 | Seu receptor está com defeito ou sem vínculo com o transmissor. |
| … | … | … | … |
A tabela completa com todos os possíveis problemas pelo buzzer pode ser encontrada neste link da documentação oficial do Betaflight.
Outros Problemas Comuns
Se o Betaflight não mostra flags de desarmamento, o problema pode ser outra coisa. Verifique:
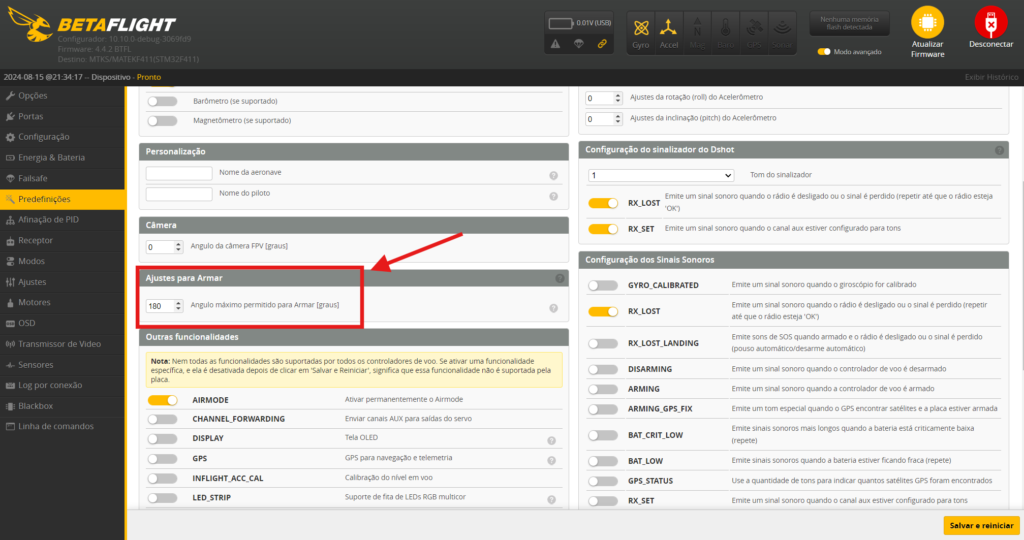
Problemas com o Acelerômetro
Se o ângulo máximo de armar na aba Configuração estiver abaixo de 180 (valor padrão 25), seu quad deve estar abaixo desse ângulo para armar. Certifique-se de que está em uma superfície nivelada e calibre o ACC.
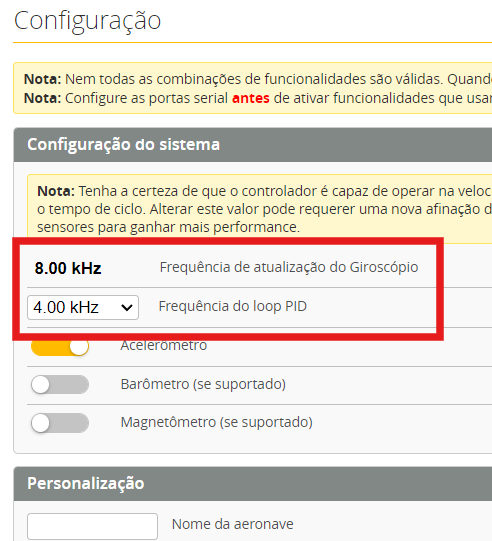
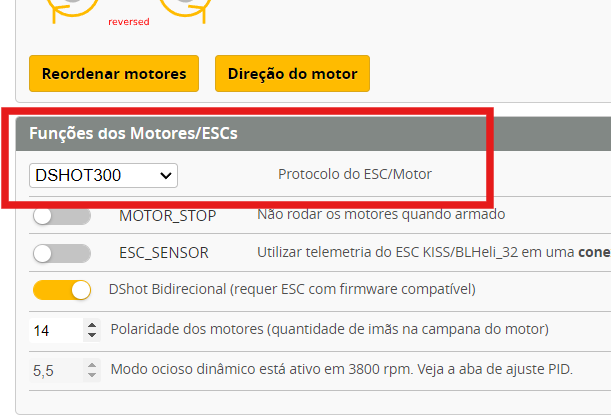
Uso da CPU
Quando a carga da CPU está muito alta, o Betaflight se recusa a armar. Mantenha a carga da CPU abaixo de 80% ajustando configurações como a frequência do loop PID e protocolo DSHOT na aba Motores.
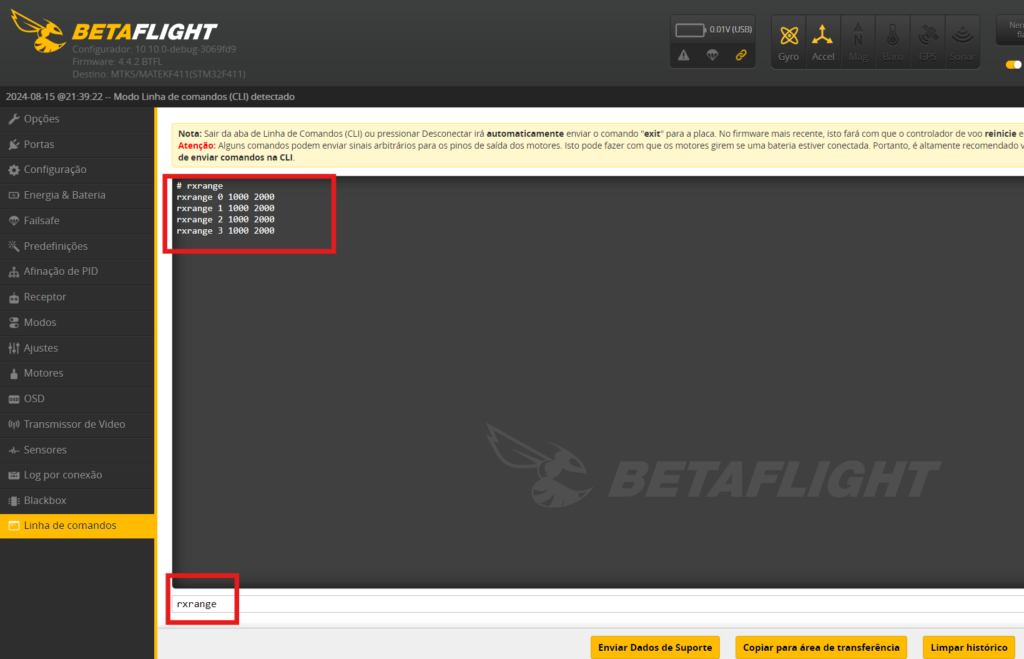
Pontos Finais da Aceleração
Certifique-se de que sua aceleração está corretamente calibrada. Quando o valor mais baixo da aceleração é maior do que deveria, o Betaflight se recusa a armar. Se for preciso, ajuste os valores dos canais pelo comando rxrange na CLI.
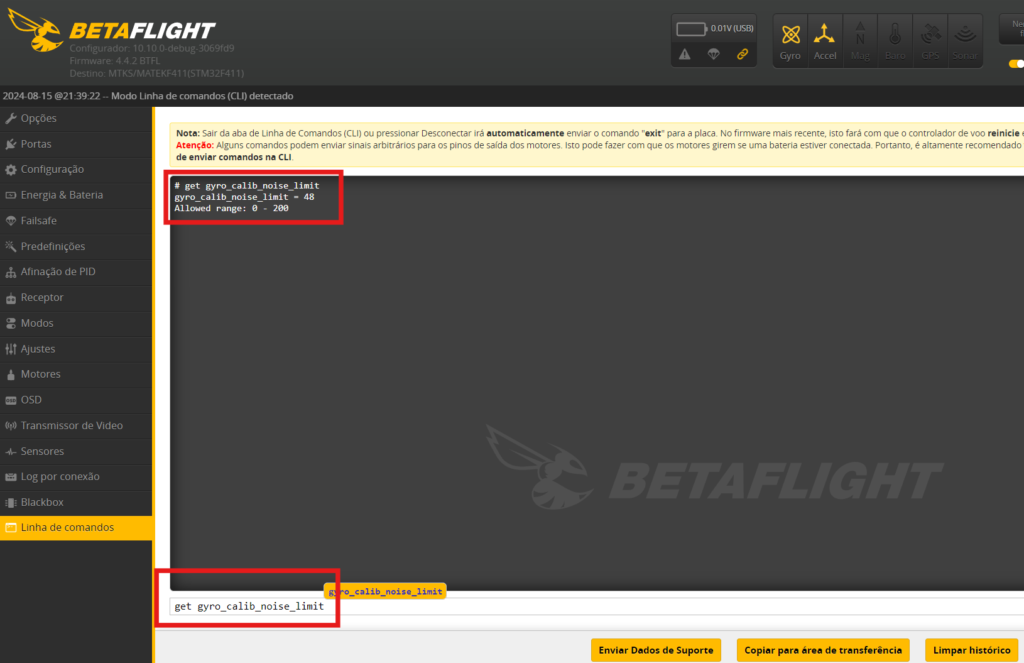
Limite de Ruído do Acelerômetro
Alguns controladores de voo têm giroscópios mais sensíveis e o drone pode se recusar a calibrar e inicializar após ligar. Aumentar a configuração “gyro_calib_noise_limit” no CLI pode reduzir a sensibilidade do giroscópio durante a inicialização.
Essa é a técnica mais eficaz sobre drones FPV que você vai aprender hoje! Saiba Mais
Conclusão
Espero que este guia tenha sido útil! Deixe um comentário se seu problema de armar foi causado por algo não coberto aqui. Se você ainda tiver problemas após seguir este guia, por favor, poste sua pergunta em nossa comunidade que está sempre pronta para ajudar!
Não se esqueça de se inscrever no nosso canal do Youtube para mais conteúdos e dicas sobre drones de FPV.
Conheça nossos Cursos e Formações em Drones de FPV.
#fpv #dronefpv #drone #academiadofpv #dronedefpv #cursodedrone #droneracer #filmagemcomfpv #montardronefpv #cursodrone #cursodronefpv #betaflight #troubleshootingdrones #dronetips #dronesevirados #dronemaintenance #dronerepairs #flyingdrones #fpvsimulation #dronelessons

0 comments